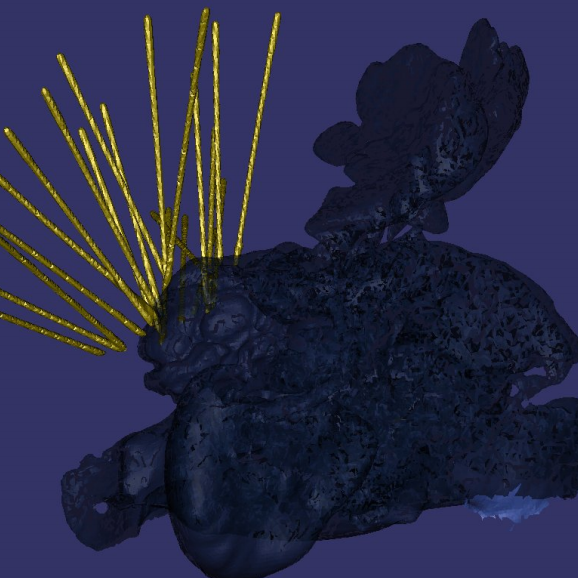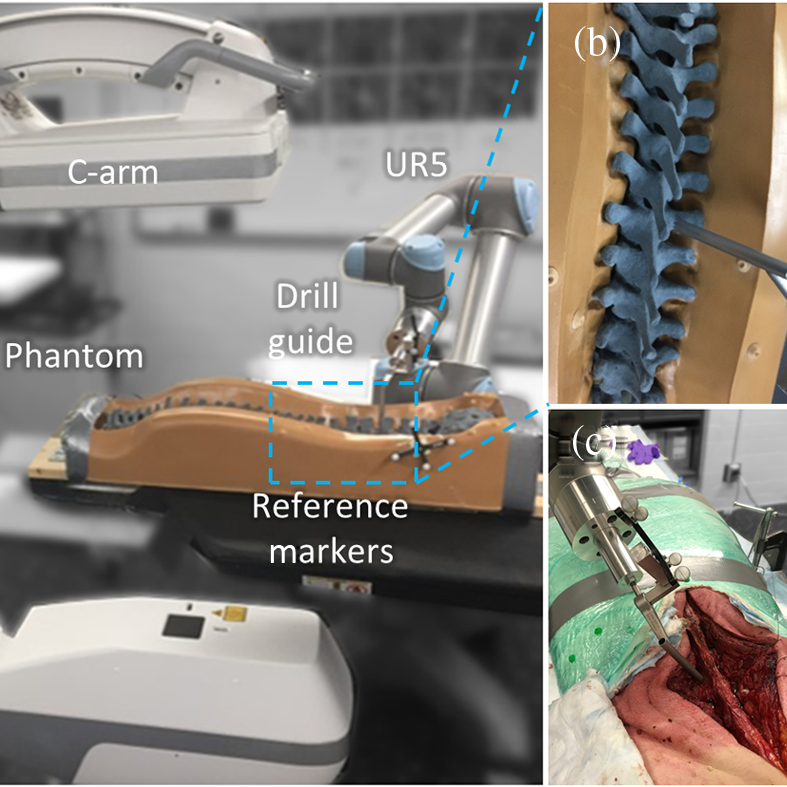
Robotic drill guide positioning using known-component 3D–2D image registration
Robotic drill guide positioning using known-component 3D–2D image registration
You Might Also Like
Clinical translation of the levelcheck decision support algorithm for target localization in spine surgery
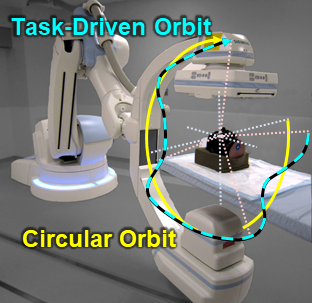
Double-Feature! A Pair of Papers by Sarah Capostagno, Web Stayman, and the I-STAR Team Show Task-Driven Orbits for Cone-Beam CT on a Robotic C-Arm